March 15, 2019
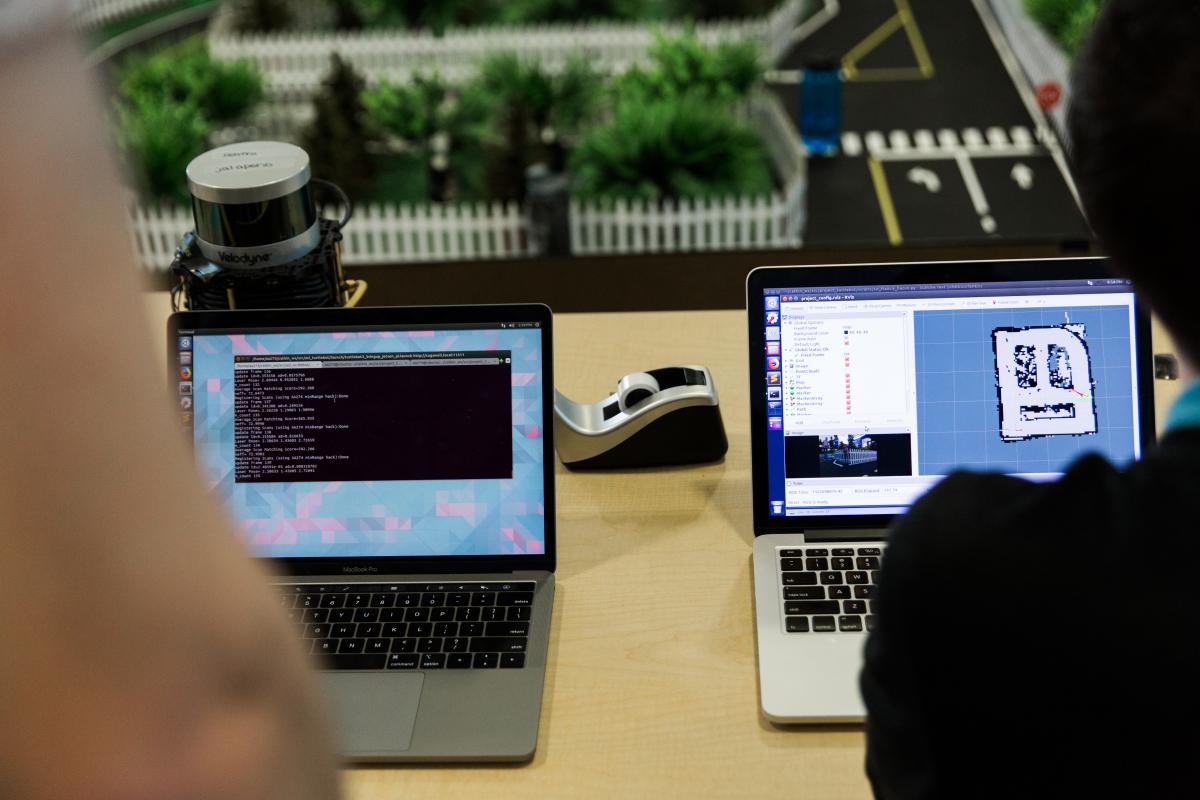
CARS Co-Director, Marco Pavone's AA274 class (Principles of Robotic Autonomy) covers basic principles for endowing mobile autonomous robots with perception, planning and decision-making capabilities in this 10-week course. Algorithmic approaches for robot perception, localization and mapping; control of non-linear systems, learning-based control, and robot motion planning; introduction to methodologies for reasoning under uncertainty, e.g. (partially obervable) Markov decision processes are covered. Students showcased their autonomous vehicles in a mock food delivery scenario at VAIL. This course is sponsored by CARS.