
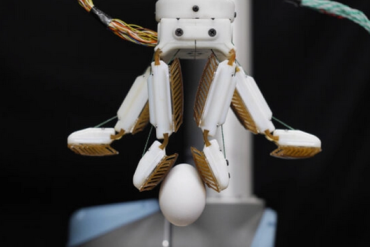
Researchers from the Stanford Biomimetics and Dextrous Manipulation Lab have developed a robotic hand capable of handling a wide variety of items. The multi-jointed fingers topped with gecko-inspired adhesives, creates a strong hold via microscopic flaps. Below the adhesives, finger pads, a collapsible rib structure, ensures equal forces on the adhesive pads.